
多圈绝对值编码器


一、概述
多圈绝对值编码器是专门为执行器行业和自动化行业研制开发的,可测量和
记忆角度的绝对位置,在量程范围内旋转角度和旋转圈数信息具有唯一性。
采用数字接口传输单圈角度和多圈圈数值,多圈最多可记忆4096 圈,单圈
分辨率为10 位(0.351 度),掉电不丢失位置信息(不需要电池供电,机械记忆)。
具有抗干扰能力强,抗震、防尘的特点。
二、基本工作原理
该编码器属于精密光电、磁混合编码器,它集精密机、电、光、磁技术于一
体。单圈角度由磁性编码器完成,多圈圈数通过6 只光电编码盘记忆,所以编码
器记忆的是绝对位置信息。
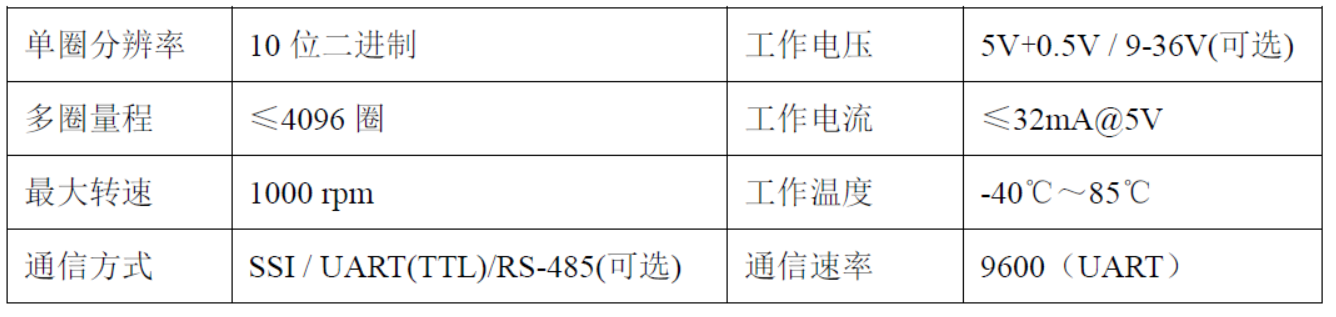
三、主要参数
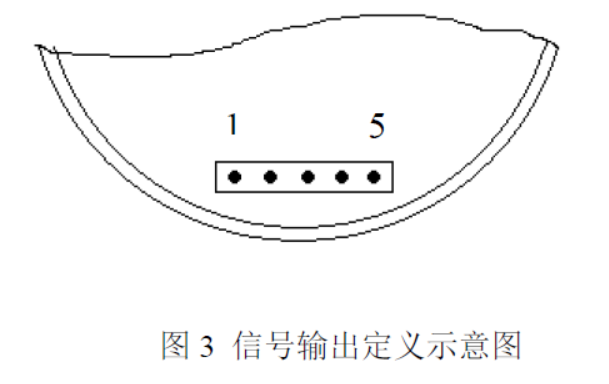
四、电路接口
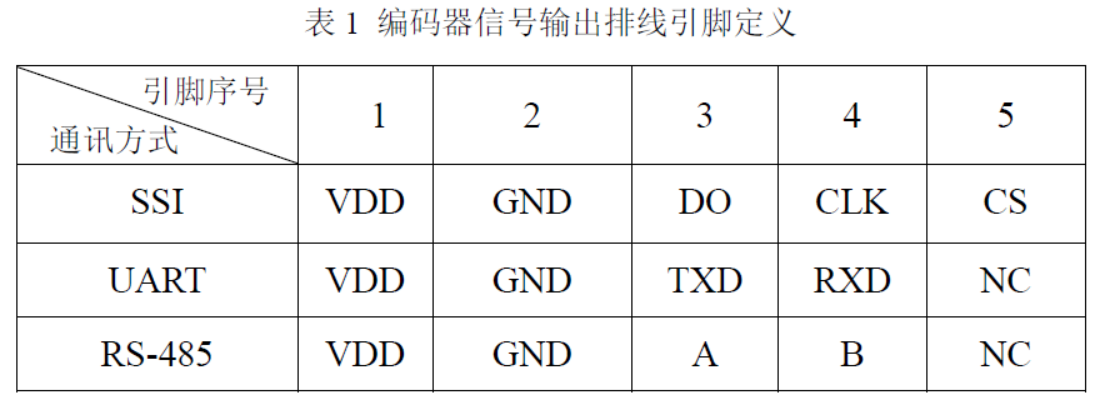
信号输出采用5 芯扁排线连接,信号线排序如图3 所示。引脚定义见表1。
五、安装尺寸
编码器安装尺寸见图2。
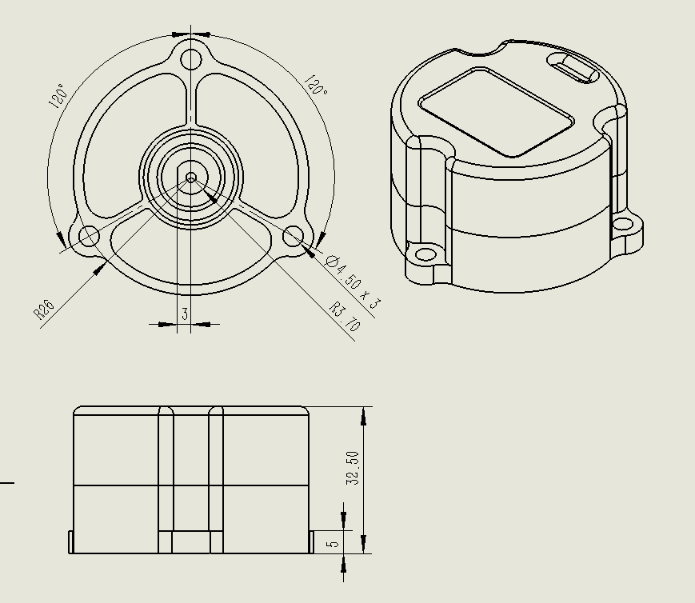
图2 . 绝对值编码器结构尺寸图
注意事项:
1、轴深度最大为15mm。不可超出此尺寸;
2、 轴承为轻载轴承,轴端严禁击打或承受较大的负载;
六、SSI 通信协议
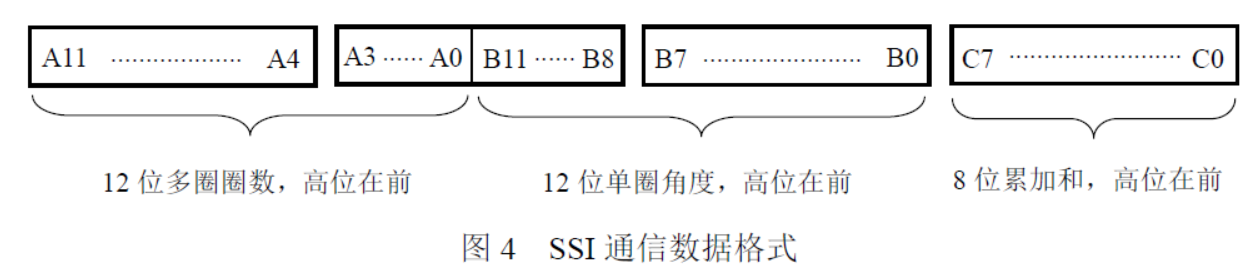
(一)SSI 通信数据格式
SSI 通信共计4 字节,前3 字节为角度数据,最后1 字节为累加和校验码。
累加和是编码器多圈数值和单圈角度的3 字节的累加和。
图4 为SSI 通信数据格式。
(二)SSI 通信时序
SSI 通信时序如图5 所示。限于篇幅,图5 只完整画出前3 字节的时序。
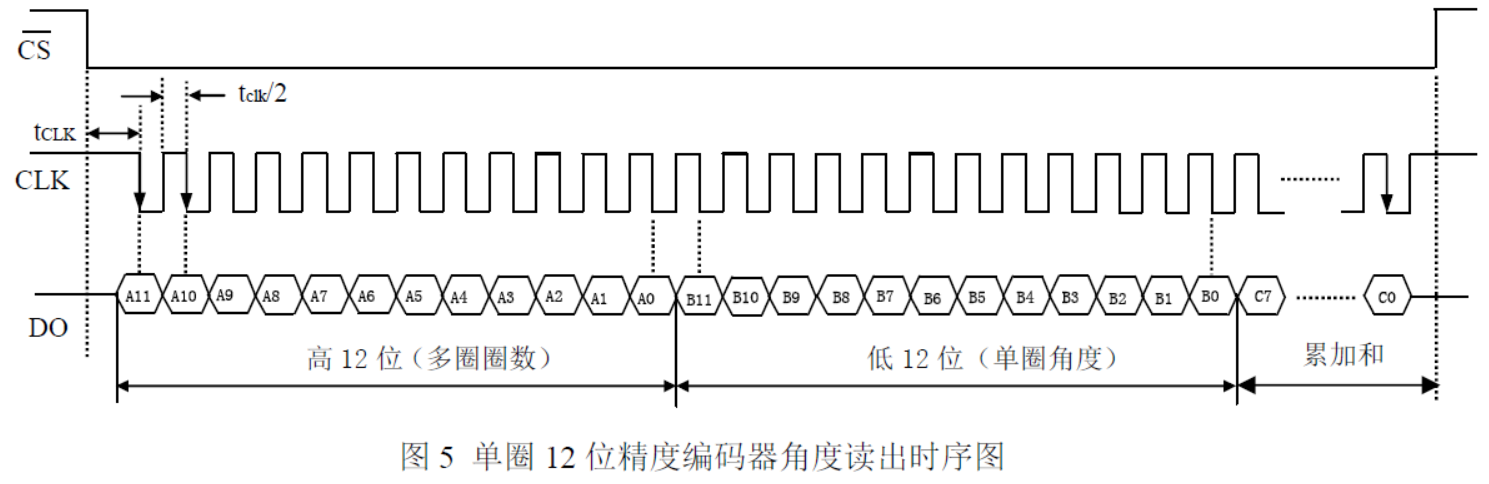
角度输出时序注意事项:
1、CS 必须在CLK 的高电平期间变为低。
2、CS 变为低后,经过最短tCLK 的时间后,在CLK 高电平期间编码器准备数据,
低电平期间用户读出数据,20us≤tCLK≤100us。
3、CLK 高电平至少保持tCLK/2 的时间。
4、任何时刻CS 拉高后,通信立刻终止。
5、需要注意的是:通信结束后要及时将CS 变为高电平,否则编码器不会退出
通信。
7、如果单圈精度是10 位,读出的最后两位B1,B0 舍弃即可。
七、UART 通信协议
(一)、UART 通信数据格式
UART 采用8 为数据异步通信格式,默认波特率为9600,1 起始位,8 数
据位,1 停止位,无奇偶校验。
(二)、UART 通信协议
读取指令:0XA0
返回数据:D1 D2 D3 D4
用户系统向编码器发送“0XA0”命令后,编码器就立刻向用户系统发送当
前的3 字节位置数据和1 字节累加和校验码,共4 字节。
注意:
(1)累加为D1+D2+D3,取低八位。
(2)如果单圈精度是10 位,读出的最后两位D31,D30 舍弃就可。
八、Modbus-RTU 通信协议
(一)、通信数据格式
UART 采用8 为数据异步通信格式,默认波特率为9600,1 起始位,8 数
据位,1 停止位,无奇偶校验。
(二)、通信协议
1)查询指令
读取指令:0X01 0X03 0X00 0X00 0X00 0X02 0XC4 0X0B
返回数据:0X01 0X03 0X04 D1 D2 D3 D4 CRCL CRCH
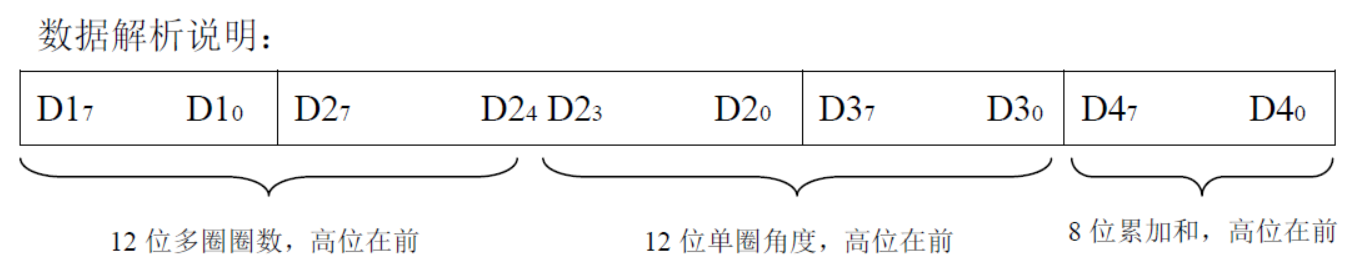
数据解析说明:
12 位多圈圈数,高位在前 12 位单圈角度,高位在前 8 位累加和,高位在前
多圈绝对值编码器
6
(1)D1、D2 组成多圈数据值,D1 为高8 位,D2 为低8 位
(2)D3、D4 组成单圈数据值,D3 为高8 位,D4 为低8 位
2)设置自动发送模式
设置指令:0X01 0X05 T1 0XAA 0X55
数据解析说明:
(1) T1 为自动发送的时间周期,单位为10ms。
例:设置1S 发送一次,则发送指令:0X01 0X05 0X64 0XAA 0X55
(2)当T1 为0 时,默认为轮询模式,不自动发送数据。
电 话:0519-85182261
传 真:0519-85112261
邮 箱:czzhw401@163.com
微信号:13861054351
手机:18106115351
地 址:常州市新北区通江中路600号19幢606

